Creating A Custom Robot¶
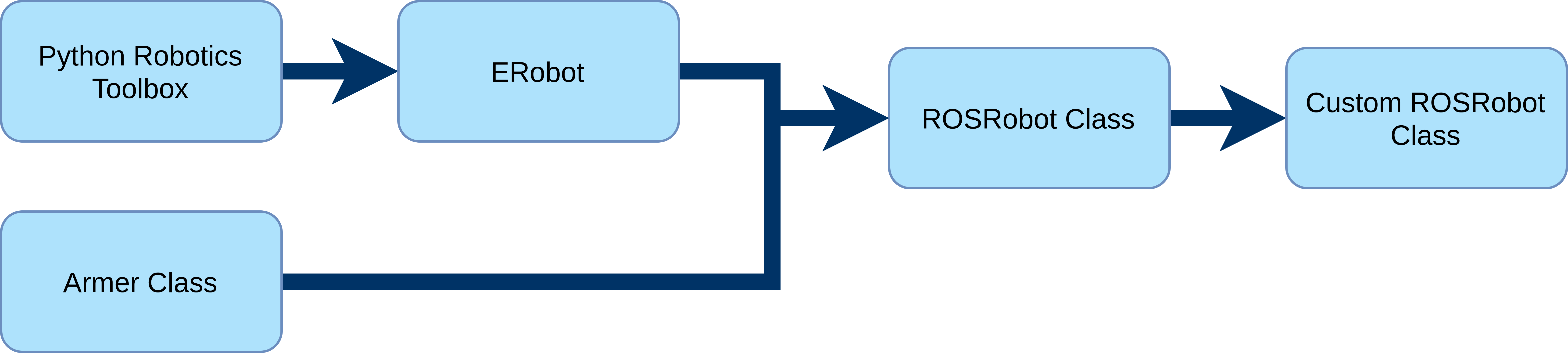
Sometimes a manipulator’s ROS drivers will not be in the format Armer expects or has features beyond Armer’s standard framework.
Any discrepencies can be adjusted for by extending the Armer Robot class.
Possible cases include:
The ROS drivers using different message types from Armer
Adding functionality such as recovery functionality
Create the following file structure:
├── HARDWARE_PACKAGE_NAME
│ ├── __init__.py
│ └── robots
│ ├── __init__.py
│ └── ROBOT_NAME.py
├── cfg
│ ├── ROBOT_NAME_real.yaml
│ └── ROBOT_NAME_sim.yaml
├── CMakeLists.txt
├── launch
│ └── robot_bringup.launch
├── LICENSE
├── package.xml
├── README.md
└── setup.py
To create the custom robot, the following template can be used. Save it as ROBOT_NAME.py in the robots folder:
import rospy
import actionlib
import roboticstoolbox as rtb
from armer.robots import ROSRobot
class {CUSTOM_ROBOT_NAME}ROSRobot(ROSRobot):
def __init__(self,
robot: rtb.robot.Robot,
controller_name: str = None,
*args,
**kwargs):
super().__init__(robot, *args, **kwargs)
def the_function_to_override():
print("cool code")
Any variant functionality can be declared as a function that will be called instead of the default Armer functions such as get_state.
In order for Armer and RTB to be able to find the custom robot, the __init__.py and setup.py files must also be configured correctly.
The contents __init__.py of should be as follows:
from armer_ROBOT_NAME.robots.ROBOT_NAME import {CUSTOM_ROBOT_NAME}ROSRobot __all__ = [ {CUSTOM_ROBOT_NAME}ROSRobot ]
An example of setup.py can be found in armer_mico. Modify armer_mico instances to match the name of the custom package.
To use the custom robot, call it in the config file. This is done by specifying the type field of the relevant robot subsection. For example:
robots:
- name: arm
model: roboticstoolbox.models.{ROBOT_MODEL}
type: {HARDWARE_PACKAGE_NAME}.robots.{CUSTOM_ROBOT_NAME}ROSRobot
backend:
type: armer.backends.ROS.ROS