Modules¶
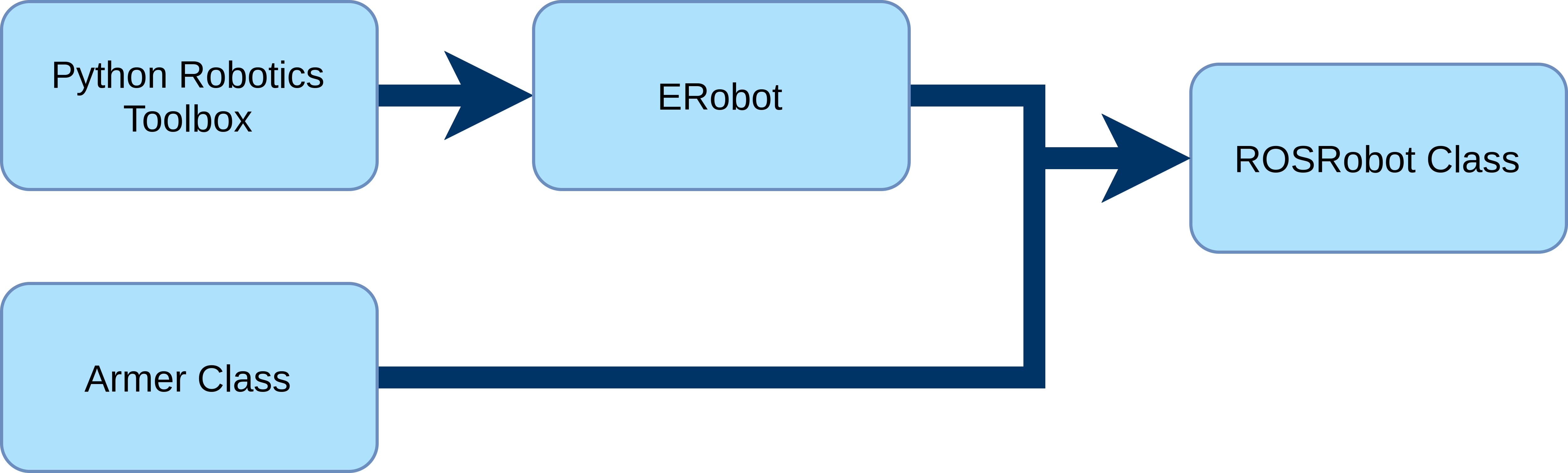
The main Armer class creates an instance of the ROSRobot class. The ROSRobot class takes a Robotics Toolbox URDF model to create an ROS robot object.
Armer class¶
The Armer class is the wrapper class that launches the ROSRobot object class and backends.
ROSRobot module¶
The ROSRobot class inheirits from the RTB ERobot class to wrap ROS functionality and movement into the implementation.
ROS Backend¶
Armer implements a ROS backend as a Python class for interfacing with physical arms. The class contains several functions to simplify ROS interactions.